A brand new algorithmic planner developed at Carnegie Mellon College’s Robotics Institute divides up duties optimally between people and robots.
As robots more and more be a part of individuals engaged on the manufacturing unit ground, in warehouses, and elsewhere on the job, figuring out who will do which duties will increase in complexity and significance. Persons are higher suited to some jobs, robots for others. And in some instances, it's advantageous to spend time educating a robotic to do a process now and reap the rewards later.
Researchers at Carnegie Mellon College’s Robotics Institute (RI) have developed an algorithmic planner that helps delegate duties to people and robots. The planner, “Act, Delegate or Study” (ADL), considers a listing of duties and decides how greatest to assign them. The researchers requested three questions: When ought to a robotic act to finish a process? When ought to a process be delegated to a human? And when ought to a robotic study a brand new process?
“There are prices related to the selections made, such because the time it takes a human to finish a process or educate a robotic to finish a process and the price of a robotic failing at a process,” stated Shivam Vats, the lead researcher and a Ph.D. pupil within the RI. “Given all these prices, our system gives you the optimum division of labor.”
The crew’s work may very well be worthwhile in manufacturing and meeting crops, for sorting packages, or in any atmosphere the place people and robots collaborate to finish a number of jobs. As a way to check the planner, researchers arrange situations the place people and robots needed to insert blocks right into a peg board and stack components of various sizes and shapes product of LEGO bricks.
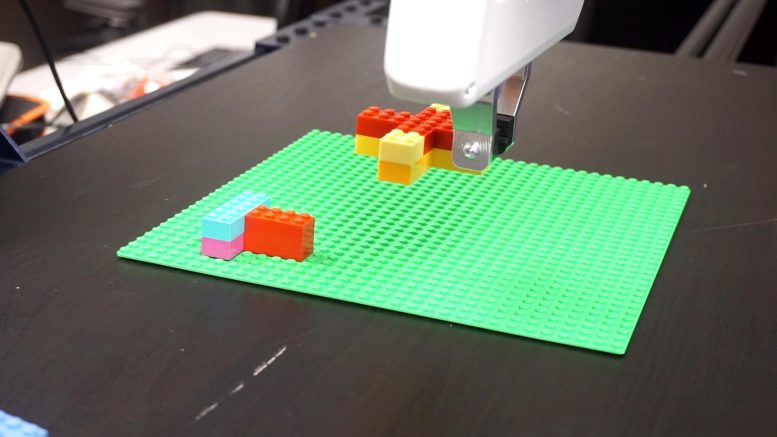
A robotic stacks LEGO bricks throughout simulations of the ADL planner. Robotics Institute researchers have developed an algorithmic planner that helps delegate duties to people and robots. Credit score: Carnegie Mellon College
Utilizing algorithms and software program to resolve the best way to delegate and divide labor is just not new, even when robots are a part of the crew. Nevertheless, this work is among the many first to incorporate robotic studying in its reasoning.
“Robots aren’t static anymore,” Vats stated. “They are often improved and they are often taught.”
Usually in manufacturing, an individual will manually manipulate a robotic arm to show the robotic the best way to full a process. Educating a robotic takes time and, subsequently, has a excessive upfront value. However it may be helpful in the long term if the robotic can study a brand new talent. A part of the complexity is deciding when it's best to show a robotic versus delegating the duty to a human. This requires the robotic to foretell what different duties it might full after studying a brand new process.
Given this info, the planner converts the issue right into a combined integer program — an optimization program generally utilized in scheduling, manufacturing planning, or designing communication networks — that may be solved effectively by off-the-shelf software program. The planner carried out higher than conventional fashions in all situations and decreased the price of finishing the duties by 10% to fifteen%.
Reference: “Synergistic Scheduling of Studying and Allocation of Duties in Human-Robotic Groups” by Shivam Vats, Oliver Kroemer and Maxim Likhachev, 14 March 2022, Pc Science > Robotics.
arXiv:2203.07478
Vats introduced the work, “Synergistic Scheduling of Studying and Allocation of Duties in Human-Robotic Groups” on the Worldwide Convention on Robotics and Automation in Philadelphia, the place it was nominated for the excellent interplay paper award. The analysis crew included Oliver Kroemer, an assistant professor in RI; and Maxim Likhachev, an affiliate professor in RI.
The analysis was funded by the Workplace of Naval Analysis and the Military Analysis Laboratory.
Post a Comment